







В 2019 году Студенческое конструкторское бюро (СКБ) получило заказ от садоводства им. М.А. Лисавенко на конструирование машины для приствольной обработки почвы.
Существующие аналоги имели недостатки, поэтому конструкторы занимались разработкой собственной машины. Уже осенью 2020 года машина для приствольной обработки почвы успешно прошла первые испытания.
На этом её история могла бы закончиться, но конструкторы из СКБ не привыкли останавливаться на достигнутом. Ввиду повсеместного внедрения автоматизации и минимизации ручного труда, студент факультета энергомашиностроения и автомобильного транспорта Никита Раззамазов продолжил работу над совершенствованием машины.
Благодаря выигранному гранту по программе «УМНИК» Никита смог выйти на новый уровень в работе с машиной. Одним из ключевых этапов была работа со стендом. Сейчас, по результатам стендовых испытаний проектируется опытный образец машины.
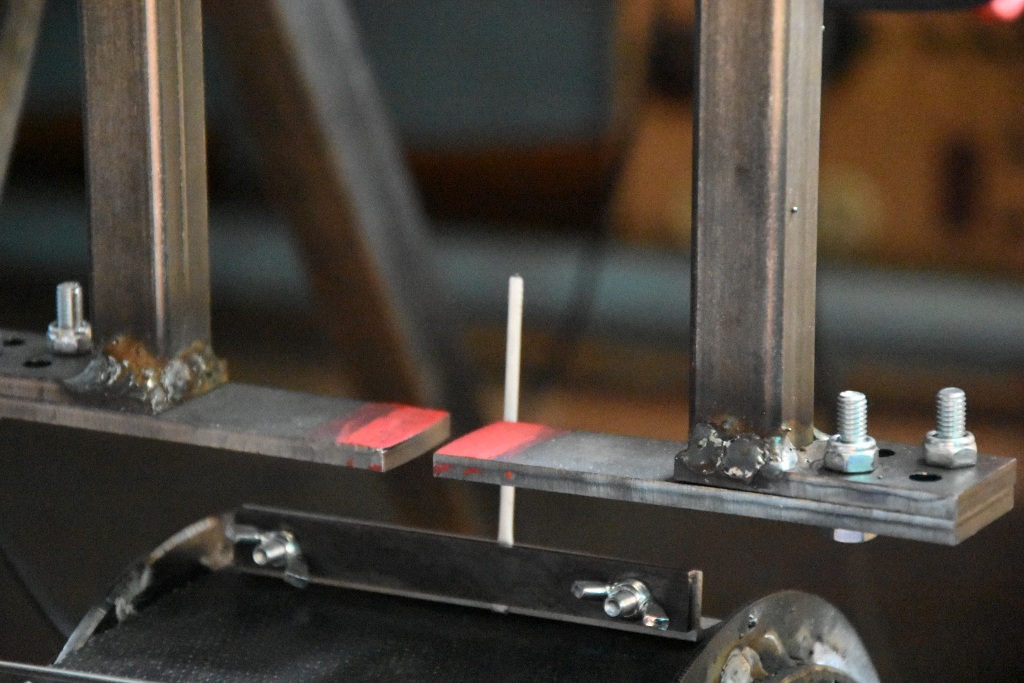
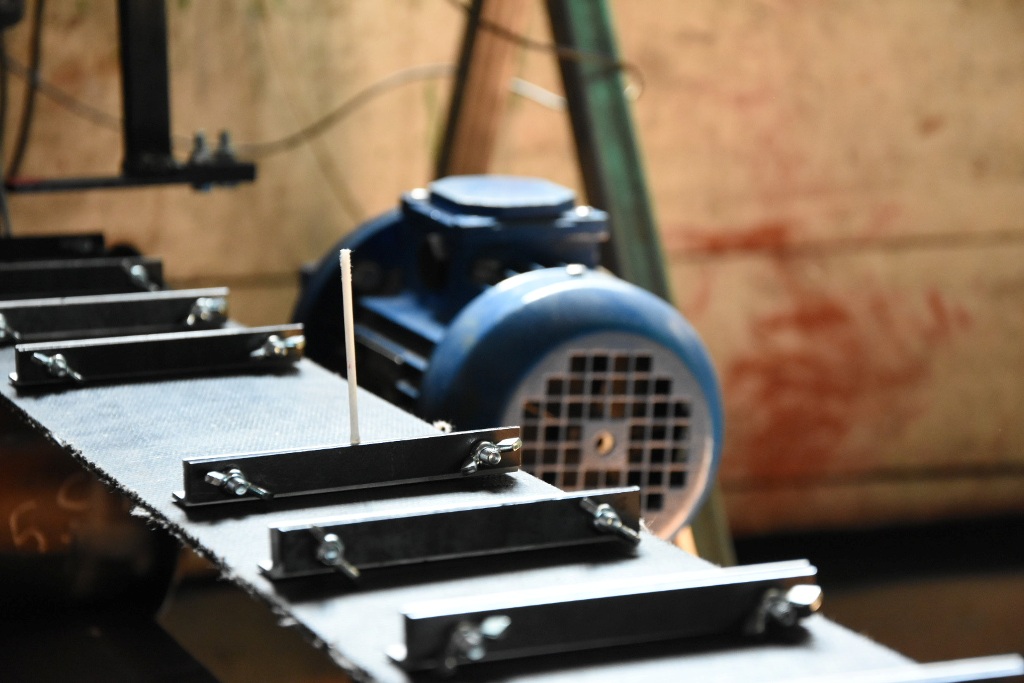
«Стенд содержит имитатор рядка и движения агрегата, рабочую часть и автоматизированную систему управления рабочими органами (АСУ). В АСУ входит ноутбук, управляющее устройство, представленное геймпадом, плата Ардуино, шаговый двигатель (ШД), драйвер ШД, индуктивные датчики и блок питания, от которого питается драйвер ШД. Ноутбук выступает как часть контроллера, который отвечает за обработку входных и передачу выходных сигналов, и как часть видеосистемы, принимая видеосигнал с камеры, установленной на модуле. Индуктивные датчики предусмотрены для того, чтобы модуль не выходил за пределы рабочей зоны, ограниченной лентой, и не упирался в косынки.
Задача оператора — следить за положением модуля относительно имитаторов саженца, которые должны пройти в зазор между пластинами ИРО (имитатора рабочего органа)», – рассказывает Никита.
Сейчас Никита уже упростил работу оператора, превратив её в своеобразную игру – больше не нужно находиться в машине и управлять ей в поле, можно сидеть за компьютером и моделировать всю работу удалённо. В перспективе планируется, совсем исключить человеческий фактор, машина сама будет различать, где сорняки, а где растения.
Проведение функциональных испытаний машины для приствольной обработки почвы запланировано на осень 2022 года.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}